လျှပ်စစ်ကားများကို အဓိကအားဖြင့် အစိတ်အပိုင်းသုံးပိုင်းဖြင့် ဖွဲ့စည်းထားပြီး မော်တာမောင်းနှင်စနစ်၊ ဘက်ထရီစနစ်နှင့် မော်တော်ယာဉ်ထိန်းချုပ်မှုစနစ်တို့ ဖြစ်သည်။မော်တာမောင်းနှင်မှုစနစ်သည် လျှပ်စစ်စွမ်းအင်ကို စက်စွမ်းအင်အဖြစ် တိုက်ရိုက်ပြောင်းလဲပေးသည့် အစိတ်အပိုင်းဖြစ်ပြီး လျှပ်စစ်ကားများ၏ စွမ်းဆောင်ရည် ညွှန်ကိန်းများကို ဆုံးဖြတ်ပေးသည့် အစိတ်အပိုင်းဖြစ်သည်။ထို့ကြောင့် drive motor ၏ရွေးချယ်မှုသည် အထူးအရေးကြီးပါသည်။
သဘာဝပတ်ဝန်းကျင် ကာကွယ်ရေးအတွက်၊ လျှပ်စစ်ကားများသည် မကြာသေးမီနှစ်များအတွင်း သုတေသနပြုလုပ်ရန် နေရာတစ်ခု ဖြစ်လာခဲ့သည်။လျှပ်စစ်ကားများသည် မြို့ပြသွားလာမှုတွင် ဓာတ်ငွေ့ထုတ်လွှတ်မှု သုည သို့မဟုတ် အလွန်နည်းပါးစွာ ရရှိနိုင်ပြီး သဘာဝပတ်ဝန်းကျင် ထိန်းသိမ်းရေးနယ်ပယ်တွင် ကြီးမားသော အားသာချက်များရှိသည်။နိုင်ငံတိုင်းက လျှပ်စစ်ကားတွေ ဖွံ့ဖြိုးတိုးတက်ဖို့ ကြိုးစားနေကြတယ်။လျှပ်စစ်ကားများကို အဓိကအားဖြင့် အစိတ်အပိုင်းသုံးပိုင်းဖြင့် ဖွဲ့စည်းထားပြီး မော်တာမောင်းနှင်စနစ်၊ ဘက်ထရီစနစ်နှင့် မော်တော်ယာဉ်ထိန်းချုပ်မှုစနစ်တို့ ဖြစ်သည်။မော်တာမောင်းနှင်မှုစနစ်သည် လျှပ်စစ်စွမ်းအင်ကို စက်စွမ်းအင်အဖြစ် တိုက်ရိုက်ပြောင်းလဲပေးသည့် အစိတ်အပိုင်းဖြစ်ပြီး လျှပ်စစ်ကားများ၏ စွမ်းဆောင်ရည် ညွှန်ကိန်းများကို ဆုံးဖြတ်ပေးသည့် အစိတ်အပိုင်းဖြစ်သည်။ထို့ကြောင့် drive motor ၏ရွေးချယ်မှုသည် အထူးအရေးကြီးပါသည်။
1. မောင်းနှင်မော်တာများအတွက် လျှပ်စစ်ကားများအတွက် လိုအပ်ချက်များ
လက်ရှိတွင် လျှပ်စစ်ကားများ၏ စွမ်းဆောင်ရည်ကို အကဲဖြတ်ခြင်းသည် အောက်ပါ စွမ်းဆောင်ရည် အညွှန်းကိန်းသုံးခုကို အဓိကအားဖြင့် ထည့်သွင်းစဉ်းစားသည် ။
(1) အမြင့်ဆုံးမိုင်အကွာအဝေး (ကီလိုမီတာ): ဘက်ထရီအားအပြည့်သွင်းပြီးနောက် လျှပ်စစ်ကား၏ အမြင့်ဆုံးမိုင်အကွာအဝေး၊
(၂) အရှိန်မြှင့်နိုင်မှု (များ)- လျှပ်စစ်ကားတစ်စီး ရပ်ထားရာမှ သတ်မှတ်ထားသော အမြန်နှုန်းအထိ အရှိန်မြှင့်ရန် အနည်းဆုံးအချိန်၊
(၃) အမြင့်ဆုံးအမြန်နှုန်း (km/h) : လျှပ်စစ်ကားတစ်စီး ရောက်ရှိနိုင်သော အမြင့်ဆုံးမြန်နှုန်း။
လျှပ်စစ်ကားများ၏ မောင်းနှင်မှုဝိသေသလက္ခဏာများအတွက် ဒီဇိုင်းထုတ်ထားသော မော်တာများသည် စက်မှုမော်တာများနှင့် နှိုင်းယှဉ်ပါက အထူးစွမ်းဆောင်ရည်လိုအပ်ချက်များရှိသည်-
(1) လျှပ်စစ်မော်တော်ကား မောင်းနှင်သည့် မော်တာသည် မကြာခဏ စတင်ခြင်း/ရပ်တန့်ခြင်း၊ အရှိန်မြှင့်ခြင်း/အရှိန်လျော့ခြင်းနှင့် torque ထိန်းချုပ်ခြင်းအတွက် မြင့်မားသော တက်ကြွသော စွမ်းဆောင်ရည် လိုအပ်ချက်များ လိုအပ်ပါသည်။
(၂) ယာဉ်တစ်စီးလုံး၏အလေးချိန်ကို လျှော့ချရန်အတွက် မြန်နှုန်းမြင့် ဂီယာကို များသောအားဖြင့် ဖျက်သိမ်းလေ့ရှိပြီး မော်တာသည် အရှိန်နိမ့်ချိန်တွင် သို့မဟုတ် တောင်တက်သည့်အခါတွင် ပိုမိုမြင့်မားသော torque ပေးနိုင်ရန်လိုအပ်ပြီး များသောအားဖြင့် 4-5 ကြိမ် ခံနိုင်ရည်ရှိရန် လိုအပ်ပါသည်။ ဝန်ပို;
(၃) အမြန်နှုန်း စည်းမျဉ်းဘောင်သည် တတ်နိုင်သမျှ ကျယ်ရန် လိုအပ်ပြီး တစ်ချိန်တည်းတွင် အရှိန်ထိန်းညှိမှု အကွာအဝေးတစ်ခုလုံးအတွင်း မြင့်မားသော လည်ပတ်မှုစွမ်းဆောင်ရည်ကို ထိန်းသိမ်းထားရန် လိုအပ်ပါသည်။
(4) မော်တာအား အတတ်နိုင်ဆုံး အဆင့်သတ်မှတ်ထားသော အမြန်နှုန်းမြင့်စေရန် ဒီဇိုင်းထုတ်ထားပြီး တစ်ချိန်တည်းတွင် အလူမီနီယံသတ္တုစပ်ကာဘောင်ကို တတ်နိုင်သမျှ အသုံးပြုပါသည်။မြန်နှုန်းမြင့် မော်တာသည် အရွယ်အစားသေးငယ်သောကြောင့် လျှပ်စစ်ကားများ၏ အလေးချိန်ကို လျှော့ချရန် အထောက်အကူဖြစ်စေသည်။
(၅) လျှပ်စစ်ကားများသည် အကောင်းဆုံး စွမ်းအင်အသုံးချမှု ရှိသင့်ပြီး ဘရိတ်စွမ်းအင် ပြန်လည်ရယူသည့် လုပ်ဆောင်ချက်လည်း ရှိသင့်သည်။ပြန်လည်ထုတ်လုပ်ထားသော ဘရိတ်အုပ်ခြင်းဖြင့် ပြန်လည်ရရှိသောစွမ်းအင်သည် ယေဘုယျအားဖြင့် စုစုပေါင်းစွမ်းအင်၏ 10% မှ 20% သို့ရောက်ရှိသင့်သည်။
(၆) လျှပ်စစ်ကားများတွင်အသုံးပြုသည့် မော်တာ၏လုပ်ငန်းခွင်ပတ်ဝန်းကျင်သည် ပိုမိုရှုပ်ထွေးကြမ်းတမ်းပြီး မော်တာအား ကောင်းမွန်သောယုံကြည်စိတ်ချရမှုနှင့် ပတ်ဝန်းကျင်လိုက်လျောညီထွေရှိရန် လိုအပ်ပြီး တစ်ချိန်တည်းတွင် မော်တာထုတ်လုပ်မှုကုန်ကျစရိတ်မှာ အလွန်မြင့်မားကြောင်းသေချာစေရန်အတွက် လိုအပ်ပါသည်။
2. အသုံးများသော drive မော်တာများစွာ
2.1 DC မော်တာ
လျှပ်စစ်ကားများ ဖွံ့ဖြိုးတိုးတက်မှု၏ အစောပိုင်းအဆင့်တွင် လျှပ်စစ်ကားအများစုသည် DC မော်တာများကို မောင်းနှင်မော်တာများအဖြစ် အသုံးပြုကြသည်။ဤမော်တာနည်းပညာအမျိုးအစားသည် လွယ်ကူသောထိန်းချုပ်မှုနည်းလမ်းများနှင့် ကောင်းမွန်သောအမြန်နှုန်းထိန်းညှိမှုတို့ဖြင့် အတော်လေးရင့်ကျက်ပါသည်။အရှိန်ထိန်းမော်တာများတွင် အသုံးအများဆုံးဖြစ်ခဲ့သည်။.သို့သော်၊ DC မော်တာ၏ ရှုပ်ထွေးသော စက်ပိုင်းဆိုင်ရာ တည်ဆောက်ပုံဖြစ်သည့် စုတ်တံများနှင့် စက်ပိုင်းဆိုင်ရာ ကွန်မြူတာတာများ၊ ၎င်း၏ ချက်ခြင်း ဝန်ပိုနိုင်စွမ်းနှင့် မော်တာအမြန်နှုန်း တိုးလာခြင်းတို့မှာ အကန့်အသတ်ရှိပြီး ရေရှည်အလုပ်အတွက်၊ စက်ပိုင်းဆိုင်ရာ တည်ဆောက်ပုံ၊ motor ကို Loss ထုတ်ပေးပြီး ပြုပြင်ထိန်းသိမ်းမှုစရိတ်များ တိုးလာမည်ဖြစ်သည်။ထို့အပြင်၊ မော်တာလည်ပတ်နေချိန်တွင် ဘရပ်ရှများမှ မီးပွားများသည် ရဟတ်ကို အပူတက်စေကာ စွမ်းအင်ကို ဖြုန်းတီးစေကာ အပူပျံ့စေရန် ခက်ခဲစေကာ ယာဉ်၏စွမ်းဆောင်ရည်ကို ထိခိုက်စေသည့် ကြိမ်နှုန်းမြင့် လျှပ်စစ်သံလိုက်လှိုင်းများ အနှောင့်အယှက်ဖြစ်စေသည်။အထက်ဖော်ပြပါ DC မော်တာများ၏ ချို့ယွင်းချက်များကြောင့် လက်ရှိ လျှပ်စစ်ကားများသည် အခြေခံအားဖြင့် DC မော်တာများကို ဖယ်ရှားပစ်ပါသည်။
2.2 AC asynchronous မော်တာ
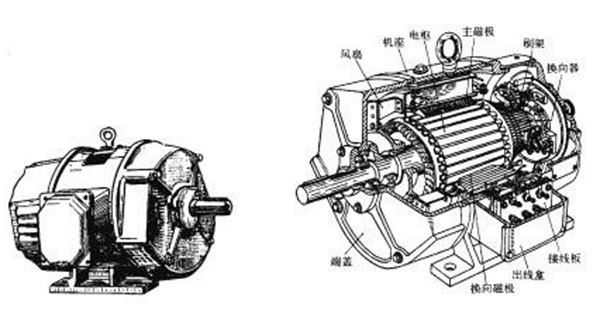
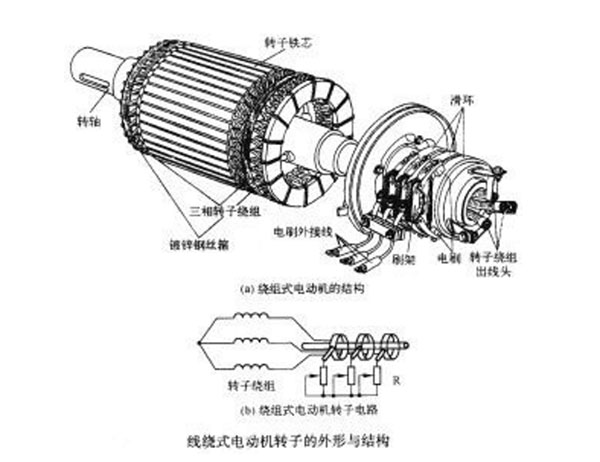
AC asynchronous motor သည် စက်မှုလုပ်ငန်းတွင် အသုံးများသော မော်တာအမျိုးအစားဖြစ်သည်။stator နှင့် rotor ကို ဆီလီကွန်စတီးအလွှာများဖြင့် အုပ်ထားသောကြောင့် ထူးခြားချက်ဖြစ်သည်။အစွန်းနှစ်ဖက်ကို အလူမီနီယမ်ကာဗာများဖြင့် ထုပ်ပိုးထားသည်။ယုံကြည်စိတ်ချရပြီး တာရှည်ခံသော လည်ပတ်မှု၊ ပြုပြင်ထိန်းသိမ်းမှု လွယ်ကူခြင်း။တူညီသောပါဝါရှိသော DC မော်တာနှင့် နှိုင်းယှဉ်ပါက AC asynchronous motor သည် ပိုမိုထိရောက်ပြီး ထုထည်သည် တစ်ဝက်ခန့်ပိုမိုပေါ့ပါးပါသည်။vector control ၏ထိန်းချုပ်မှုနည်းလမ်းကိုအသုံးပြုပါက၊ ထိန်းချုပ်နိုင်မှုနှင့် DC motor နှင့်နှိုင်းယှဉ်နိုင်သောပိုမိုကျယ်ပြန့်သောအမြန်နှုန်းစည်းမျဉ်းအကွာအဝေးကိုရရှိနိုင်ပါသည်။မြင့်မားသောစွမ်းဆောင်ရည်၊ မြင့်မားတိကျသောပါဝါနှင့် မြန်နှုန်းမြင့်လည်ပတ်မှုအတွက် သင့်လျော်မှုတို့ကြောင့် AC asynchronous မော်တာများသည် စွမ်းအားမြင့်လျှပ်စစ်ကားများတွင် အသုံးအများဆုံး မော်တာများဖြစ်သည်။လက်ရှိတွင်၊ AC asynchronous motors များကို အကြီးစားထုတ်လုပ်ထားပြီး အရွယ်ရောက်ပြီးသော ထုတ်ကုန်များကို ရွေးချယ်ရန် အမျိုးအစားများစွာရှိပါသည်။သို့ရာတွင်၊ မြန်နှုန်းမြင့်လည်ပတ်မှုကိစ္စတွင်၊ မော်တာ၏ရဟတ်သည် ပြင်းထန်စွာအပူပေးပြီး လည်ပတ်နေစဉ်အတွင်း မော်တာကို အအေးခံရပါမည်။တစ်ချိန်တည်းမှာပင်၊ asynchronous motor ၏ drive and control system သည် အလွန်ရှုပ်ထွေးပြီး မော်တာကိုယ်ထည်၏ ကုန်ကျစရိတ်မှာလည်း မြင့်မားပါသည်။အမြဲတမ်းသံလိုက် မော်တာနှင့် ပြောင်းထားသော တွန့်ဆုတ်မှုတို့နှင့် နှိုင်းယှဉ်ပါက မော်တာများအတွက်၊ လျှပ်စစ်ကားများ၏ အမြင့်ဆုံး မိုင်အကွာအဝေးကို တိုးတက်စေရန် အထောက်အကူမပြုသော စွမ်းဆောင်ရည်နှင့် ပါဝါသိပ်သည်းဆသည် နည်းပါးပါသည်။
2.3 အမြဲတမ်းသံလိုက်မော်တာ
stator windings ၏ မတူညီသော လက်ရှိ လှိုင်းပုံစံများအလိုက် အမြဲတမ်း သံလိုက်မော်တာများကို အမျိုးအစား နှစ်မျိုး ခွဲခြားနိုင်ပြီး၊ တစ်ခုမှာ brushless DC မော်တာဖြစ်ပြီး၊ စတုဂံသွေးခုန်နှုန်းလှိုင်းစီးကြောင်းပါရှိသည်။အခြားတစ်ခုသည် sine wave current ပါရှိသော အမြဲတမ်းသံလိုက် synchronous motor ဖြစ်သည်။မော်တာ အမျိုးအစား နှစ်မျိုးသည် အခြေခံအားဖြင့် တည်ဆောက်ပုံ နှင့် အလုပ်လုပ်ပုံ အခြေခံ တူညီပါသည်။ရဟတ်များသည် အမြဲတမ်းသံလိုက်များဖြစ်ပြီး စိတ်လှုပ်ရှားမှုကြောင့် ဆုံးရှုံးမှုကို လျော့နည်းစေသည်။stator သည် torque ကို alternating current ဖြင့်ထုတ်လုပ်ရန် အကွေ့အကောက်များဖြင့် တပ်ဆင်ထားသောကြောင့် အအေးခံရန်မှာ အတော်လေးလွယ်ကူပါသည်။ဤမော်တာအမျိုးအစားသည် စုတ်တံများနှင့် စက်ပိုင်းဆိုင်ရာ ပြောင်းလဲမှုဖွဲ့စည်းပုံတို့ကို တပ်ဆင်ရန် မလိုအပ်သောကြောင့် လည်ပတ်နေစဉ်အတွင်း အကူးအပြောင်း မီးပွားများ ထုတ်ပေးမည်မဟုတ်ပါ၊ လည်ပတ်မှုသည် လုံခြုံစိတ်ချရပြီး ပြုပြင်ထိန်းသိမ်းမှုလည်း အဆင်ပြေကာ စွမ်းအင်သုံးစွဲမှုနှုန်းလည်း မြင့်မားပါသည်။
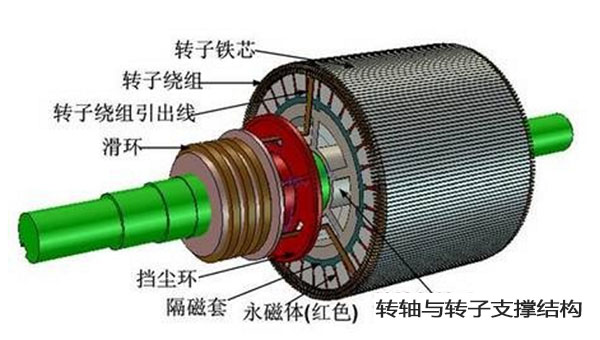
အမြဲတမ်းသံလိုက်မော်တာ၏ထိန်းချုပ်မှုစနစ်သည် AC asynchronous motor ၏ထိန်းချုပ်မှုစနစ်ထက်ပိုမိုရိုးရှင်းသည်။သို့သော် အမြဲတမ်းသံလိုက်ပစ္စည်း လုပ်ငန်းစဉ်၏ ကန့်သတ်ချက်ကြောင့် အမြဲတမ်းသံလိုက်မော်တာ၏ ပါဝါအကွာအဝေးသည် သေးငယ်ပြီး အမြင့်ဆုံးပါဝါသည် ယေဘုယျအားဖြင့် သန်းဆယ်ဂဏန်းမျှသာဖြစ်ပြီး အမြဲတမ်းသံလိုက်မော်တာ၏ အကြီးမားဆုံးအားနည်းချက်ဖြစ်သည်။တစ်ချိန်တည်းမှာပင်၊ ရဟတ်ပေါ်ရှိ အမြဲတမ်းသံလိုက်ပစ္စည်းသည် မြင့်မားသောအပူချိန်၊ တုန်ခါမှုနှင့် overcurrent အခြေအနေများအောက်တွင် သံလိုက်ယိုယွင်းမှုဖြစ်စဉ်တစ်ခုရှိလိမ့်မည်၊ ထို့ကြောင့် ရှုပ်ထွေးသောလုပ်ငန်းခွင်အခြေအနေအောက်တွင် အမြဲတမ်းသံလိုက်မော်တာသည် ပျက်စီးတတ်သည်။ထို့အပြင်၊ အမြဲတမ်းသံလိုက်ပစ္စည်းများ၏စျေးနှုန်းမြင့်မားသောကြောင့်မော်တာတစ်ခုလုံးနှင့်၎င်း၏ထိန်းချုပ်မှုစနစ်ကုန်ကျစရိတ်မြင့်မားသည်။
2.4 ပြောင်းလဲထားသော တွန့်ဆုတ်နေသော မော်တာ
မော်တာအမျိုးအစားအသစ်အနေဖြင့်၊ switched reluctance motor သည် အခြားသော drive motor အမျိုးအစားများနှင့် နှိုင်းယှဉ်ပါက အရိုးရှင်းဆုံးတည်ဆောက်ပုံရှိသည်။stator နှင့် rotor နှစ်ခုစလုံးသည် သာမန် ဆီလီကွန်စတီးအခင်းများဖြင့် ပြုလုပ်ထားသော နှစ်ဆထင်ရှားသော အဆောက်အဦများဖြစ်သည်။ရဟတ်တွင် ဖွဲ့စည်းပုံမရှိပါ။stator တွင် ရိုးရှင်းပြီး အစိုင်အခဲဖွဲ့စည်းပုံ၊ ယုံကြည်စိတ်ချရမှု၊ ပေါ့ပါးမှု၊ ကုန်ကျစရိတ်သက်သာမှု၊ စွမ်းဆောင်ရည်မြင့်မားမှု၊ အပူချိန်နိမ့်ကျမှုနှင့် ပြုပြင်ထိန်းသိမ်းရလွယ်ကူမှုစသည့် အားသာချက်များစွာပါရှိသည်။ထို့အပြင်၊ ၎င်းသည် DC အမြန်နှုန်းထိန်းချုပ်မှုစနစ်၏ ကောင်းမွန်သောထိန်းချုပ်နိုင်မှုလက္ခဏာများရှိပြီး ကြမ်းတမ်းသောပတ်ဝန်းကျင်များအတွက် သင့်လျော်ပြီး လျှပ်စစ်ကားများအတွက် မောင်းနှင်သည့်မော်တာအဖြစ် အသုံးပြုရန် အလွန်သင့်လျော်ပါသည်။

လျှပ်စစ်ကားမောင်းနှင်သည့်မော်တာများ၊ DC မော်တာများနှင့် အမြဲတမ်းသံလိုက်မော်တာများသည် ဖွဲ့စည်းတည်ဆောက်ပုံနှင့် ရှုပ်ထွေးသောလုပ်ငန်းခွင်ပတ်ဝန်းကျင်တွင် လိုက်လျောညီထွေစွာ လိုက်လျောညီထွေဖြစ်အောင် ညံ့ဖျင်းပြီး စက်ပိုင်းဆိုင်ရာနှင့် သံလိုက်ဓာတ်ပြုခြင်းဆိုင်ရာ ချို့ယွင်းမှုများ ဖြစ်နိုင်ခြေရှိကြောင်း ထည့်သွင်းစဉ်းစားခြင်းဖြင့် ဤစာတမ်းတွင် switched reluctance motors နှင့် AC asynchronous motors များကို မိတ်ဆက်ခြင်းအပေါ် အလေးပေးဖော်ပြပါသည်။စက်နှင့် နှိုင်းယှဉ်ပါက အောက်ပါအချက်များတွင် သိသာထင်ရှားသော အားသာချက်များရှိသည်။
2.4.1 မော်တာကိုယ်ထည်တည်ဆောက်ပုံ
switched reluctance motor ၏ ဖွဲ့စည်းပုံသည် squirrel-cage induction motor ထက် ပိုမိုရိုးရှင်းပါသည်။၎င်း၏ထူးခြားသော အားသာချက်မှာ ရဟတ်ပေါ်တွင် အကွေ့အကောက်များ မပါရှိဘဲ သာမာန် ဆီလီကွန်စတီးအခင်းများဖြင့်သာ ပြုလုပ်ထားသည်။မော်တာတစ်ခုလုံး၏ ဆုံးရှုံးမှုအများစုမှာ မော်တာကိုထုတ်လုပ်ရန် ရိုးရှင်းစေပြီး၊ ကောင်းမွန်သောလျှပ်ကာ၊ အေးရလွယ်ကူပြီး အလွန်ကောင်းမွန်သော အပူပျံ့စေသည့် ဝိသေသလက္ခဏာများရှိသည့် stator winding ပေါ်တွင် အာရုံစိုက်ထားသည်။ဤမော်တာဖွဲ့စည်းပုံသည် မော်တာ၏ အရွယ်အစားနှင့် အလေးချိန်ကို လျှော့ချနိုင်ပြီး သေးငယ်သော ထုထည်ဖြင့် ရရှိနိုင်သည်။ပိုကြီးတဲ့ output ပါဝါ။မော်တာရဟတ်၏ ကောင်းမွန်သော စက်ပိုင်းဆိုင်ရာ ပျော့ပျောင်းမှုကြောင့်၊ အလွန်မြန်နှုန်းမြင့်သည့် လည်ပတ်မှုတွင် ပြောင်းထားသော တုံ့ဆိုင်းနေသော မော်တာကို အသုံးပြုနိုင်သည်။
2.4.2 မော်တော်မောင်းပတ်လမ်း
switched reluctance motor drive system ၏ phase current သည် unidirectional ဖြစ်ပြီး torque direction နှင့် ဘာမှမဆိုင်ဘဲ၊ main switching device တစ်ခုတည်းကိုသာ motor ၏ four-quadrant operation state ကို ဖြည့်ဆည်းရန် အသုံးပြုနိုင်ပါသည်။ပါဝါ converter circuit ကို မော်တာ၏ excitation winding ဖြင့် အစီအရီ ချိတ်ဆက်ထားပြီး အဆင့်တစ်ခုစီမှ circuit တစ်ခုစီသည် ပါဝါကို အမှီအခိုကင်းစွာ ပံ့ပိုးပေးပါသည်။အချို့သောအဆင့်အကွေ့အကောက်များ သို့မဟုတ် မော်တာ၏ထိန်းချုပ်ကိရိယာ ပျက်ကွက်လျှင်ပင် ၎င်းသည် ပိုမိုကြီးမားသောအကျိုးသက်ရောက်မှုမဖြစ်စေဘဲ အဆင့်၏လည်ပတ်မှုကိုရပ်တန့်ရန်သာလိုအပ်သည်။ထို့ကြောင့်၊ မော်တာကိုယ်ထည်နှင့် ပါဝါ converter နှစ်ခုစလုံးသည် အလွန်လုံခြုံပြီး ယုံကြည်စိတ်ချရသောကြောင့် ၎င်းတို့သည် ကြမ်းတမ်းသောပတ်ဝန်းကျင်များတွင် အသုံးပြုရန် ပိုမိုသင့်လျော်ပါသည်။
2.4.3 မော်တာစနစ်၏ စွမ်းဆောင်ရည် ကဏ္ဍများ
Switched တုံ့ဆိုင်းနေသော မော်တာများတွင် ထိန်းချုပ်မှုဘောင်များ အများအပြားပါရှိပြီး သင့်လျော်သော ထိန်းချုပ်မှုဗျူဟာများနှင့် စနစ်ဒီဇိုင်းများဖြင့် လျှပ်စစ်ကားများ၏ လေးပုံတစ်ပုံ လည်ပတ်မှုလိုအပ်ချက်များကို ဖြည့်ဆည်းရန် လွယ်ကူပြီး မြန်နှုန်းမြင့်လည်ပတ်သည့်နေရာများတွင် ကောင်းမွန်သော ဘရိတ်စွမ်းရည်ကို ထိန်းသိမ်းထားနိုင်သည်။Switched တွန့်ဆုတ်သော မော်တာများသည် စွမ်းဆောင်ရည်မြင့်မားရုံသာမက အခြားသော မော်တာမောင်းနှင်မှုစနစ်များနှင့် မယှဉ်နိုင်သော ကျယ်ပြန့်သော အမြန်နှုန်းစည်းမျဉ်းများထက် မြင့်မားသော စွမ်းဆောင်ရည်ကိုလည်း ထိန်းသိမ်းထားသည်။ဤစွမ်းဆောင်ချက်သည် လျှပ်စစ်ကားများ၏ လည်ပတ်မှုအတွက် အလွန်သင့်လျော်ပြီး လျှပ်စစ်ကားများ၏ အပျော်စီးအကွာအဝေးကို တိုးတက်စေရန်အတွက် အလွန်အကျိုးရှိသည်။
3. နိဂုံး
ဤစာတမ်း၏ အဓိကအချက်မှာ လျှပ်စစ်ကားများ ဖွံ့ဖြိုးတိုးတက်ရေးတွင် သုတေသန ဟော့စပေါ့တစ်ခုဖြစ်သည့် လျှပ်စစ်ကားများအတွက် အသုံးများသော မောင်းနှင်မော်တာ အမြန်နှုန်းထိန်းချုပ်မှုစနစ် အမျိုးမျိုးကို နှိုင်းယှဉ်ခြင်းဖြင့် လျှပ်စစ်ကားများအတွက် မောင်းနှင်သည့် မော်တာအဖြစ် ပြောင်းလဲထားသော တုံ့ဆိုင်းနေသော မော်တာ၏ အားသာချက်များကို တင်ပြရန်ဖြစ်သည်။ဤအထူးမော်တာအမျိုးအစားအတွက်၊ လက်တွေ့အသုံးချမှုများတွင် ဖွံ့ဖြိုးတိုးတက်ရန် နေရာများစွာ ကျန်ရှိသေးသည်။သုတေသီများသည် သီအိုရီဆိုင်ရာ သုတေသနများကို လုပ်ဆောင်ရန် ပိုမိုကြိုးစားအားထုတ်ရန် လိုအပ်ပြီး တစ်ချိန်တည်းတွင် ဤမော်တာအမျိုးအစားကို လက်တွေ့တွင် အသုံးချမှုကို မြှင့်တင်ရန်အတွက် စျေးကွက်လိုအပ်ချက်များကို ပေါင်းစပ်ရန် လိုအပ်ပါသည်။
စာတိုက်အချိန်- မတ် ၂၄-၂၀၂၂